




服務熱線
0769-28680919
153-2293-3971 / 177-0769-6579

機器人3D引導抓取的工作流程主要涉及以下幾個步驟:
圖像采集:
使用3D相機(如Mech-Eye工業級3D相機)采集物體的圖像與位置信息。
視覺處理:
工控機上運行的梅卡曼德軟件基于相機采集的圖像和位置信息進行視覺處理,輸出物體的位置、姿態以及規劃的機器人的運動路徑。
手眼標定:
確定相機坐標系與機械手末端坐標系之間的空間關系,即手眼標定。這涉及到求解從相機坐標系到機械手坐標系的變換矩陣,以便將視覺系統識別的物體位置轉換為機械手坐標系下的位置。
路徑規劃:
Mech-Vision機器視覺軟件支持對視覺結果進行簡單的路徑規劃,并輸出機器人的抓取路徑。
接口通信:
機器人側和視覺系統采用同一標準通信協議進行通信,由機器人側發送請求,視覺系統處理后返回響應(目標物體的位姿和標簽信息)。
抓取執行:
機器人根據視覺系統返回的響應做進一步決策或執行相應的任務,如抓取物體。
實時調整:
機器人在執行過程中,可以根據3D視覺系統提供的實時反饋信息進行調整,以應對零部件的位置偏差或裝配錯誤。
應用案例:
在汽車行業,3D視覺引導技術被用于實現汽車零部件的上下料操作,通過分析3D模型和實際場景的匹配程度,確定零部件的位置和姿態,使機器人能夠精確地抓取和放置零部件。
柔性化生產:
3D視覺引導技術能夠適應小批量多品種的生產需求,提供更大的靈活性和自適應性,同時帶來更高的精確性、可靠性和效率。
通過上述步驟,機器人3D引導抓取系統能夠實現對無序堆放的物體進行精準識別、定位和抓取,極大地提高了生產效率和靈活性
 膠囊生產線機器視覺檢測系統
2026-01-30
膠囊生產線機器視覺檢測系統
2026-01-30
膠囊生產線上的機器視覺檢測系統,通過非接觸式成像和圖像分析,能360°自動檢測膠囊的外觀缺陷(如裂紋、異物、印字不清),替代人工目檢,提升藥品生產的質量控制效率和合規性。
 泡罩包裝線機器視覺檢測系統
2026-01-30
泡罩包裝線機器視覺檢測系統
2026-01-30
針對泡罩包裝線的機器視覺檢測系統,其核心是通過高速成像與智能算法,實現100%在線全檢,替代傳統人工抽檢,主要檢測藥品/物品缺失、破損、異物、密封不良等缺陷。
 藥盒印刷缺陷機器視覺檢測系統
2026-01-30
藥盒印刷缺陷機器視覺檢測系統
2026-01-30
一、 為什么需要這樣的系統?(必要性) 1. 藥品安全與法規合規:藥品包裝上的信息(如藥品名稱、劑量、批號、有效期、用法用量)必須100%準確清晰。任何印刷錯誤(如漏印、錯印、模糊)都可能導致嚴重的用藥錯誤,違反《藥品管理法》和GMP(藥品生產質量管理規范)等法規。
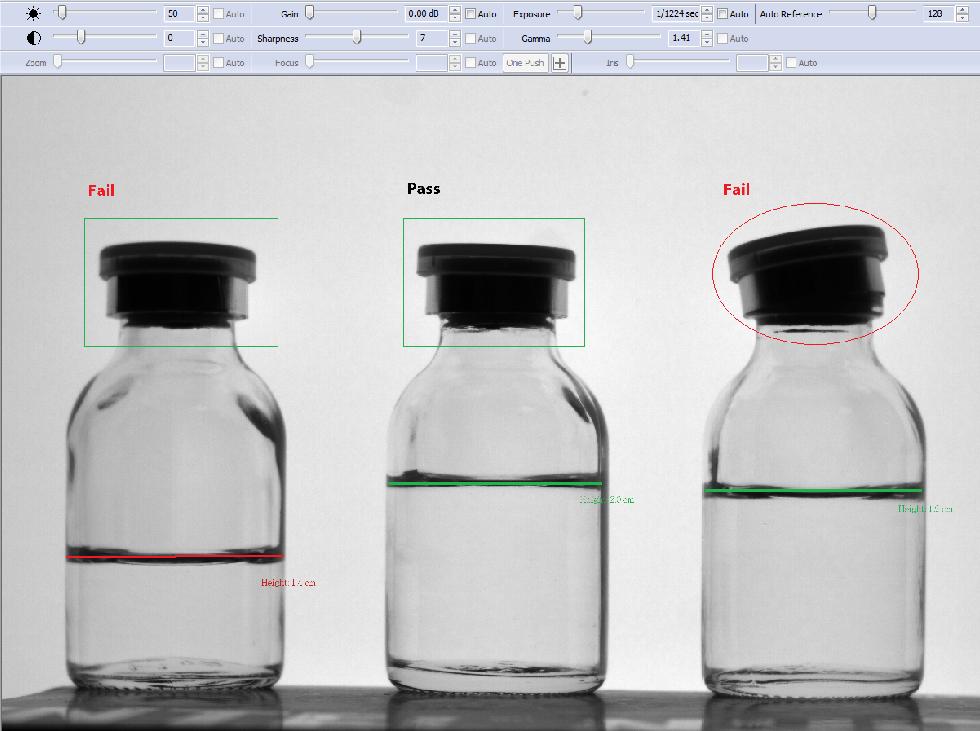 瓶裝藥品瓶內異物機器視覺檢測系統
2026-01-24
瓶裝藥品瓶內異物機器視覺檢測系統
2026-01-24
該系統旨在100%全檢藥品(注射液、西林瓶、口服液、粉針劑等)瓶內的可見異物,如玻璃屑、金屬顆粒、毛發、纖維、浮游生物等。
 官方公眾號
官方公眾號 官方抖音號
官方抖音號Copyright ? 2022 東莞康耐德智能控制有限公司版權所有.機器視覺系統 粵ICP備2022020204號-1 聯系我們 | 網站地圖
